機械手臂零件位置偏移補正
使用機械手臂抓取零件放進托盤。
希望使用機械手臂抓取零件,並放進托盤裡.
【課題】位置偏移無法放進托盤
機械手臂抓取零件時,零件的位置出現偏移無法放進托盤。

【解決對策】使用 影像感測器檢測零件的位置偏移 (座標與傾斜)
機械手臂抓取零件的狀態下,使用 小型・高速・高機能影像感測器 SV系列,檢測位置偏移 (座標與傾斜) 。
即使吸附零件時出現位置偏移,也能穩定將零件插入托盤 。

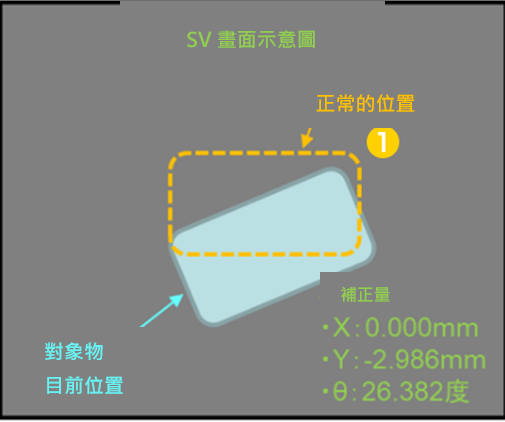
❶ 機械手臂已抓取零件的狀態下,檢測零件離正常位置的位置偏移量(座標與傾斜) 。
❷ 插入零件時,其動作會將檢測出的偏移量加入計算,可穩定將零件插入托盤 。
數值輸出
可輸出零件的位置偏移(座標與傾斜)數值。
採用重點

省空間
感測器一體成形,不占用控制盤內的空間。
位置補正
不僅判定OK/NG,也能輸出數值!可輸出偏移量後再進行修正。
上位通訊
支援Ethernet/IP通訊(轉接器)!可輕鬆與上位機器通訊。
『半固定抵抗のポジション検出』のソフトウェア・サンプル画像がダウンロードできます!
相關文章
-

檢測成型零件的黑點
使用影像感測器SV檢測成型零件上的表面黑點!
-

檢測半固定電阻的方位
檢測半固定電阻的位置!
-

機械手臂抓取電子零件
使用影像感測器檢測機械手臂在抓取電子零件時的X-Y-θ位置!
-

檢查說明書的裁切位置偏移
使用影像感測器SV系列檢查說明書的裁切位置偏移!
-

判別多種類地板材料
利用影像感測器以HSV成分判別是否為正確的板材!
-

自動讀取類比電表
使用影像感測器SV系列自動讀取類比電表(數據化)!
-

檢查沖孔加工的進給量
使用影像感測器SV系列檢測沖孔加工時的進給量!
-

檢查金屬沖壓零件的試作
使用影像感測器SV 在新作金屬壓力模具的試作討論中,確認可能發生裂縫或裂痕的位置!