基本情報

EtherCAT対応 ネットワークアンプ
業界最高クラスの性能を一体型EtherCATアンプとして実現










-
※1 多機能タイプ、用途最適タイプ
※2 標準タイプ

ラインアップ
オープンネットワーク EtherCAT 対応サーボアンプ一覧
| タイプ | シリーズ | 位置制御 | 速度制御 | トルク制御 | フル クローズ 制御 | 外部 スケール | セーフティ コネクタ | センサ フィードバック | |
|---|---|---|---|---|---|---|---|---|---|
| 回転 モータ | 標準タイプ | A7BE | |||||||
| 多機能タイプ | A7BF | ||||||||
| 用途最適タイプ | A7BR*1 |
*1: 仕様書取り交わし商品
*2: 機種により異なりますので、詳細はお問い合わせください。
※ EtherCAT は、ドイツ Beckhoff Automation GmbH によりライセンスされた特許取得済み技術であり登録商標です。
システム構成
周辺機器構成
A7B シリーズ (アンプ:B 枠 モータ200 W)

【ご注意】
製品の取り付けネジの締付トルクは使用されるネジの強度、取り付け先の材質を考慮し、緩みや破損の無い様に適切に選定してください。
例)鋼材への鋼材ネジ(M5)での締付けの場合、2.7 N・m~3.3 N・m。
適用周辺機器一覧
| アンプ | 適用 モータ | 電圧 仕様 (V) *1 | 定格出力 (W) | 電源容量 (定格負荷時) (kVA) | 配線用 遮断器 (定格電流) (A) | 短絡保護素子 (ヒューズ) (A) | ノイズ フィルタ (単相/三相) | フェライトコア | 電磁 接触器 (A) *2 | 主回路用 電線太さ 耐電圧 | 主回路用 端子台 圧着端子 *3 | 制御電源用 電線太さ | 制御電源用 端子台 圧着端子 | モータ用 電線太さ 耐電圧 *6 | モータ用 端子台 圧着端子 *4 | ブレーキ用 電線太さ 耐電圧 *6 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 主回路 電源入力 ライン | 制御回路 電源入力 ライン | ||||||||||||||||
| MADN | MSMG MHMG | 単相 100 | 50 | 約0.4 | 15 | 10 | 1 | DV0P4170 (単相専用) | DV0P1460 | 20 (3P+1a) | 2.0 mm2/ AWG14 300 VAC 以上 | 専用 コネクタ への接続 | 2.0 mm2/ AWG14 300 VAC 以上 | 専用 コネクタ への接続 | 0.75 mm2/ AWG18 〜 2.0 mm2/ AWG14 300 VAC 以上 | 専用 コネクタ への接続 | 0.3 mm2/ AWG22 ~ 0.75 mm2/ AWG18 100 VAC 以上 |
| 100 | |||||||||||||||||
| MBDN | 200 | 約0.5 | |||||||||||||||
| MCDN | 400 | 約0.9 | 20 | DV0PM20042 | |||||||||||||
| MADN | 単相 / 三相 200 | 50 | 約0.5 | 10 | DV0P4170 (単相専用)/ DV0PM20042 | ||||||||||||
| 100 | |||||||||||||||||
| 200 | 約0.6 | ||||||||||||||||
| MBDN | 400 | 約1.0 | |||||||||||||||
| MCDN | 750 | 約1.9 | 20 | DV0PM20042 | |||||||||||||
| MSMG MDMG MGMG MHMG | 850 | 約2.4 | DV0P4220 | 32 (3P+1a) | |||||||||||||
| 1000 | |||||||||||||||||
| MDDN *5 | 1000 | 35 | |||||||||||||||
| 1300 | 約2.9 | ||||||||||||||||
| 1500 | |||||||||||||||||
*1 単相/三相200 V 共用仕様は使用する電源に応じて周辺機器を選択してください。
*2 外付けダイナミックブレーキ抵抗器用に使用する電磁接触器は、主回路用に使用している電磁接触器と同じ定格のものを使用してください。
*3 アースネジ用圧着端子は、主回路用端子台圧着端子と同じにしてください。
*4 アース用電線の太さと外付けダイナミックブレーキ抵抗器用電線の太さは、モータ用電線の太さと同じ太さかその太さ以上にしてください。
*5 UL 認証時は、単相電源の場合、実効値電流の測定できるクランプメータなどを使用し、入力実効電流を12A 以下にディレーティングしてご使用願います。
*6 モータ品番により適用電線サイズが異なります。モータ品番ごとの適用電線サイズは取扱説明書または納入仕様書にてご確認ください。
※各仕様は改善などのため変更されることがあります。ご使用の際には必ず最新資料をご取得ください。
● 配線用遮断器、電磁接触器について
EU 指令/UK 規格に適合させる場合は、電源とノイズフィルタの間にIEC 規格およびUL 認定(LISTED、 マーク付)の配線用遮断器を必ず接続してください。
使用する電源の短絡電流は、製品の最大入力電圧以下のときに、対称電流5000 Arms 以下となるようにしてください。
電源の短絡電流がこれを超える場合は、限流装置(限流ヒューズや限流ブレーカ、トランスなど)を設けて短絡電流を制限して使用してください。
<ご注意>
・ 電源容量(負荷条件を考慮)に見合った容量の配線用遮断器、ノイズフィルタを選定してください。
● 端子台および保護アース端子
・ 配線には、温度定格75 ℃以上の銅導体電線を使用してください。
・ A 枠からD 枠は、付属の専用コネクタを使用します。その場合は、むき線の長さは8 mm 〜9 mm を守ってください。
| アンプ外形枠記号 | アースネジ | 上位制御器との 接続コネクタ(X4) | ||
|---|---|---|---|---|
| 呼び | 締付トルク(N・m) 注1) | 呼び | 締付トルク (N・m) 注1) | |
| MADN, MBDN, MCDN, MDDN | M4 | 0.7~0.8 | M2.6 | 0.2±0.05 |
注1)
<ご注意>
・ 締付トルクの最大値を超えると破損する可能性があります。
・ 端子台のネジが緩んだまま電源の投入を行わないでください。
・ ネジが緩んだまま電源を投入しますと、発煙や発火の原因となる可能性があります。
<お願い>
・ 締付トルクは1 年に1 回緩みはないか、定期点検を行ってください。
アンプ共通仕様
基本仕様
| 項目 | 性能 | |||
|---|---|---|---|---|
| 入力電源 | 100 V系 | 主回路電源 | 単相100~120 V、-15 %~+10 %、50/60 Hz | |
| 制御回路電源 | 単相100~120 V、-15 %~+10 %、50/60 Hz | |||
| 200 V系 | 主回路電源 | A枠~ D枠 | 単相 / 三相 200 ~240 V、-15 %~+10 %、50/60 Hz | |
| 制御回路電源 | A枠~ D枠 | 単相200~240 V、-15 %~+10 %、50/60 Hz | ||
| 使用周囲条件 | 温度 | 使用温度 0~60 ℃ (55〜60 ℃の場合は減定格にて使用可能)(凍結なきこと) 保存温度 -20~65 ℃ (最高温度保証:80 ℃、72 時間、結露なきこと*1) | ||
| 湿度 | 使用,保存湿度20~85 % RH 以下 (結露なきこと*1) | |||
| 標高 | 海抜 2000 m 以下(1000~ 2000 m の場合は減定格にて使用可能) | |||
| 振動 | 5.88 m/s2 以下,10~60 Hz | |||
| 汚損度 | 汚損度2 | |||
| 取付間隔 | 10 mm以上(1~ 10 mmの場合は減定格にて使用可能*2) | |||
| 保護等級 | IP00 | |||
| 絶縁耐圧 | 一次一アース間AC1500V、1分間を耐えること | |||
| 制御方式 | IGBT PWM 方式 正弦波駆動 | |||
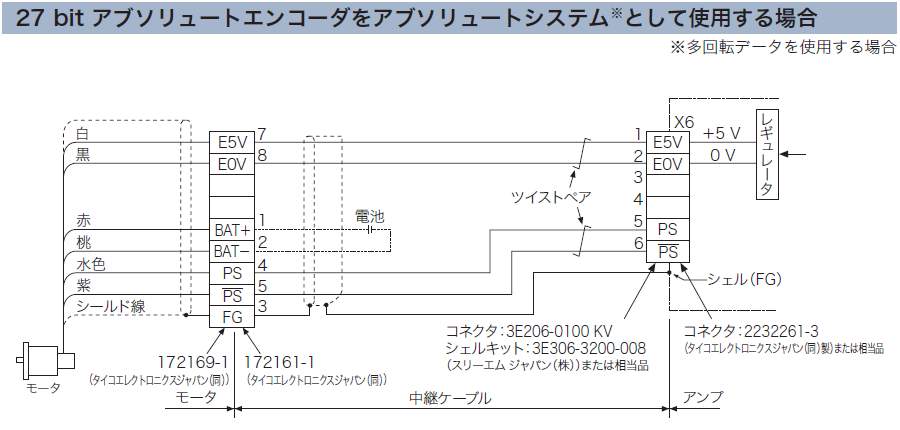
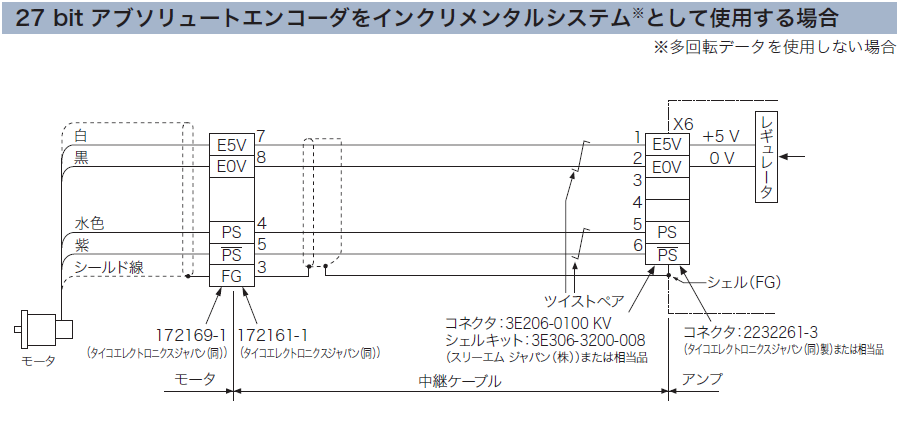
| エンコーダフィードバック | 27 bit (134217728 分解能) 7 本シリアル アブソリュートエンコーダ | |||
| 外部スケールフィードバック*3 | A/B 相・原点信号差動入力タイプ パナソニック インダストリー方式シリアル通信タイプ*4 | |||
| 制御信号 | 入力 | 汎用8 入力 汎用入力の機能はパラメータにより選択 | ||
| 出力 | 汎用3 出力 汎用出力の機能はパラメータにより選択 | |||
| アナログ信号 | 入力 | 1入力(16 bit A/D 入力)*5 | ||
| 出力 | 2出力(アナログモニタ1、アナログモニタ2) | |||
| パルス信号 | A/B相出力 (2出力) | エンコーダパルスをA/B相信号でラインドライバ出力 | ||
| 位置コンペア出力 (3出力) | 実位置がパラメータで設定された位置を通過したときに、所定のパルス信号をラインドライバ出力 | |||
| 通信機能 | EtherCAT | リアルタイムな動作指令の伝送、パラメータ設定、状態モニタなどが可能 | ||
| USB | パソコン等を接続してパラメータの設定、状態モニタなどが可能 | |||
| セーフティ機能*3 | セーフトルクオフ (STO) 2入力(セーフティ入力1、2) 1出力(EDM出力) | |||
| 前面パネル | ① ロータリスイッチ ② LED 7 セグ2 桁および状態表示用4 灯 ③ アナログモニタ用コネクタ | |||
| 回生 | A, B 枠:内蔵回生抵抗なし(外付けのみ) C, D 枠:回生抵抗内蔵(外付けも可) | |||
| ダイナミックブレーキ | A~D 枠:内蔵 | |||
| 制御モード | 位置制御:プロファイル位置制御 (pp)、サイクリック位置制御 (csp)、原点復帰位置制御 (hm) 速度制御:プロファイル速度制御 (pv)、サイクリック速度制御 (csv) トルク制御:プロファイルトルク制御 (tq)、サイクリックトルク制御 (cst) 上記制御モードはEtherCAT通信コマンドにより切り替え | |||
*1 温度が低下すると結露が発生し易くなるためご注意ください。
*2 周囲温度55 ~ 60 ℃でサーボアンプを使用する場合、および標高1000 ~ 2000 mでサーボアンプを使用する場合は、下図に示すそれぞれの負荷率を掛け合わせた負荷率で使用してください。取付間隔1 ~ 10 mm でサーボアンプを使用する場合は、下図に示す周囲温度を参照し、使用してください。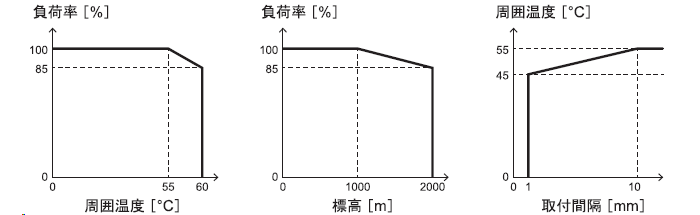
*3 標準タイプでは使用できません。
*4 対応スケールメーカおよび品番についてはコラボカタログをご参照ください。
*5 用途最適タイプ(仕様書取り交わし商品)のみ使用可能です。
機能
| モード | 項目 | 性能 | |
|---|---|---|---|
| 位置制御 | 制御入力 | 正方向駆動禁止、負方向駆動禁止、ラッチ信号、原点近傍 など | |
| 制御出力 | 位置決め完了 など | ||
| 指令入力 | EtherCATによる指令型(スムージングフィルタ使用可) | ||
| 基本機能 | 回転方向の設定、指令入力、電子ギヤ、モータ可動範囲設定、回生抵抗設定、アブソリュート設定、外部スケールタイプ選択、2自由度制御モード | ||
| 調整機能 | リアルタイムオートチューニング、適応フィルタ、ゲイン切替、第 3 ゲイン切替、ノッチフィルタ、制振制御、モデル型制振フィルタ、速度フィードフォワード、トルクフィードフォワード、負荷変動抑制、摩擦トルク補償、2 段トルクフィルタ、象限突起抑制、位置指令フィルタ、高応答電流制御、バックラッシュ補正 | ||
| 応用機能 | パルス再生、減速停止、駆動禁止入力(POT、NOT) 時減速停止、サーボオフ時減速停止、主電源オフ時減速停止、アラーム時減速停止、アラーム時即時停止、アラーム時落下防止、サーボオン時落下防止、ディレーティング、トルクリミット切替、トルク飽和保護、位置コンペア出力、1 回転アブソ、無限回転アブソ、セミクローズ制御時外部スケール位置情報モニタ、Slow Stop | ||
| 速度制御 | 制御入力 | 正方向駆動禁止、負方向駆動禁止、ラッチ信号 など | |
| 制御出力 | 速度到達、速度一致 など | ||
| 指令入力 | EtherCATによる指令型 | ||
| 基本機能 | 回転方向の設定、指令入力、電子ギヤ、回生抵抗設定、アブソリュート設定、2自由度制御モード、外部スケールタイプ選択 | ||
| 調整機能 | リアルタイムオートチューニング、適応フィルタ、ゲイン切替、ノッチフィルタ、トルクフィードフォワード、負荷変動抑制、摩擦トルク補償、2段トルクフィルタ、速度指令加減速設定、高応答電流制御 | ||
| 応用機能 | パルス再生、減速停止、駆動禁止入力(POT、NOT) 時減速停止、サーボオフ時減速停止、主電源オフ時減速停止、アラーム時減速停止、アラーム時即時停止、アラーム時落下防止、サーボオン時落下防止、ディレーティング、トルクリミット切替、トルク飽和保護、位置コンペア出力、1 回転アブソ、無限回転アブソ、セミクローズ制御時外部スケール位置情報モニタ、Slow Stop | ||
| トルク制御 | 制御入力 | 正方向駆動禁止、負方向駆動禁止、ラッチ信号 など | |
| 制御出力 | 速度到達 など | ||
| 指令入力 | EtherCATによる指令型 | ||
| 基本機能 | 回転方向の設定、指令入力、電子ギヤ、回生抵抗設定、アブソリュート設定、外部スケールタイプ選択、2 自由度制御モード、速度制限 | ||
| 調整機能 | リアルタイムオートチューニング、ゲイン切替、ノッチフィルタ、2 段トルクフィルタ、高応答電流制御、トルクフィードフォワード、摩擦トルク補償 | ||
| 応用機能 | パルス再生、減速停止、駆動禁止入力(POT、NOT) 時減速停止、サーボオフ時減速停止、主電源オフ時減速停止、アラーム時減速停止、アラーム時即時停止、アラーム時落下防止、サーボオン時落下防止、ディレーティング、トルクリミット切替、位置コンペア出力、1回転アブソ、無限回転アブソ、セミクローズ制御時外部スケール位置情報モニタ、Slow Stop | ||
| フルクローズ 制御 | 制御入力 | 正方向駆動禁止、負方向駆動禁止、ラッチ信号、原点近傍 など | |
| 制御出力 | 位置決め完了、速度到達出力、速度一致出力 など | ||
| 指令入力 | EtherCATによる指令型(スムージングフィルタ使用可) | ||
| 基本機能 | 回転方向の設定、指令入力、電子ギヤ、モータ可動範囲設定、回生抵抗設定、外部スケールタイプ選択、2自由度制御モード、外部スケール分周比の設定、ハイブリッド偏差過大の設定 | ||
| 調整機能 | リアルタイムオートチューニング、適応フィルタ、ゲイン切替、第 3 ゲイン切替、ノッチフィルタ、制振制御、速度フィードフォワード、トルクフィードフォワード、負荷変動抑制、摩擦トルク補償、ハイブリッド振動抑制、2段トルクフィルタ、象限突起抑制、位置指令フィルタ、高応答電流制御、バックラッシュ補正 | ||
| 応用機能 | パルス再生、減速停止、駆動禁止入力(POT、NOT) 時減速停止、サーボオフ時減速停止、主電源オフ時減速停止、アラーム時減速停止、アラーム時即時停止、アラーム時落下防止、サーボオン時落下防止、ディレーティング、トルクリミット切替、トルク飽和保護、位置コンペア出力、セミクローズ制御時外部スケール位置情報モニタ | ||
| 共通 | 安全機能 | STO | |
| 保護機能 | 保護停止、警告、タイムスタンプ | ||
※各機能名の説明(機能用語解説)についてはカタログをご参照ください。
※各仕様は改善などのため変更されることがあります。ご使用の際には必ず最新資料をご取得ください。
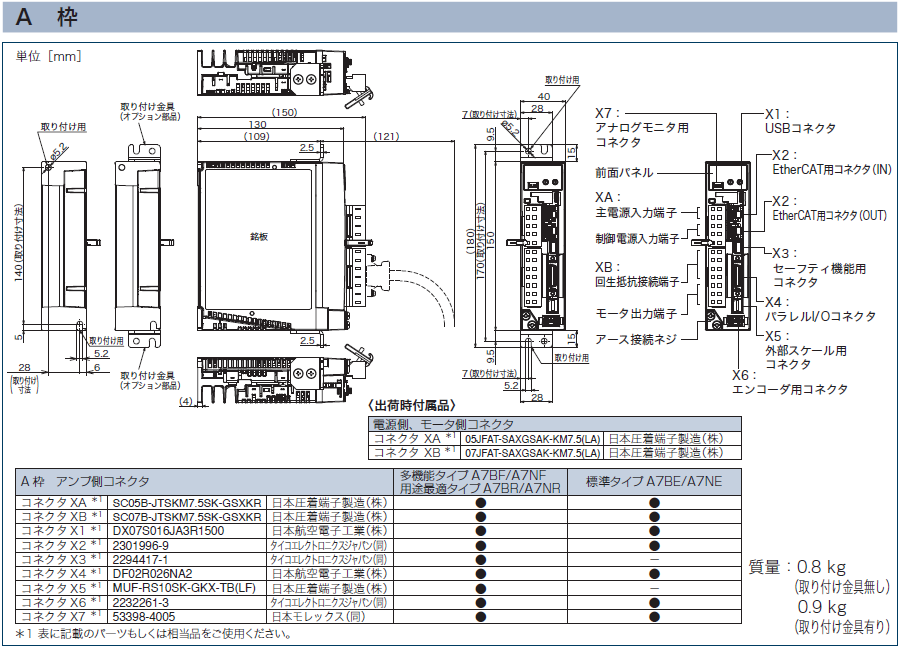
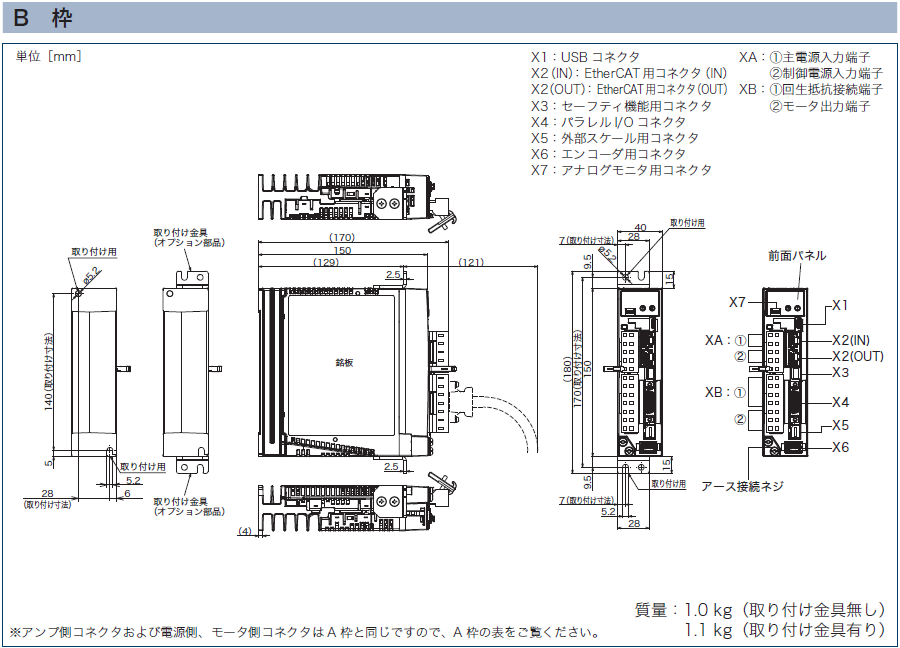
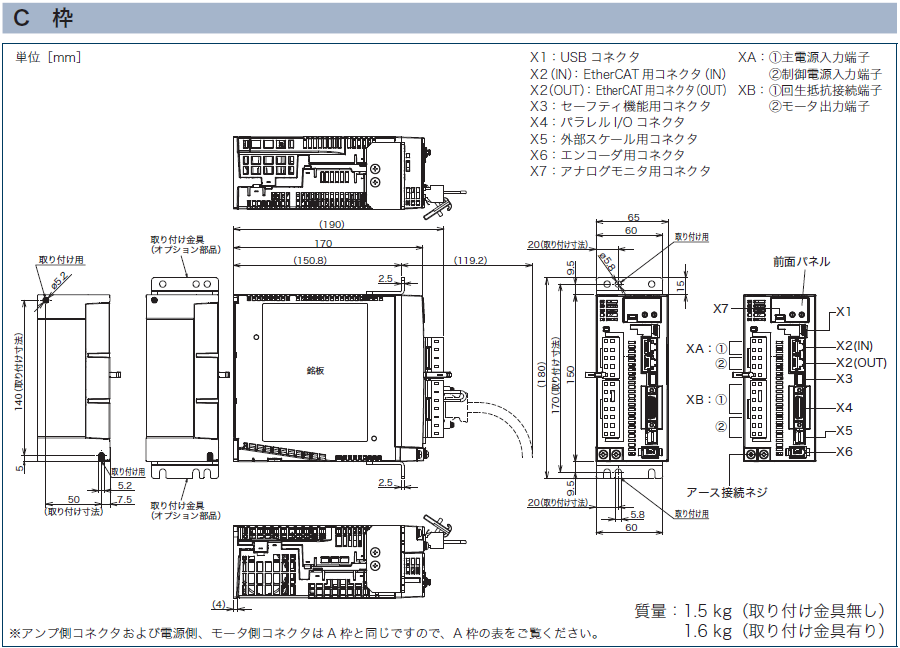
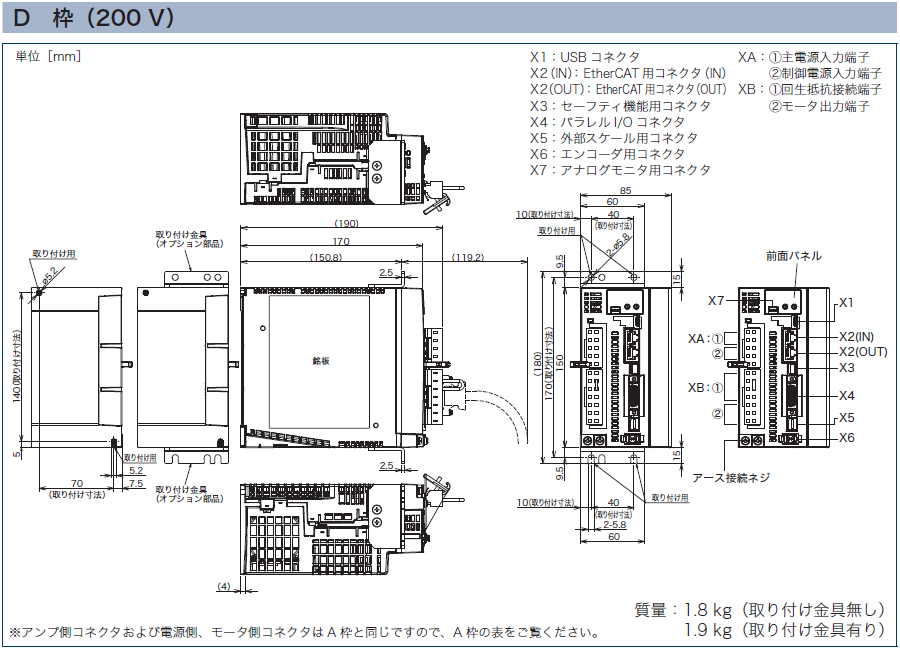
外形寸法図
アンプ外形寸法図
配線・接続
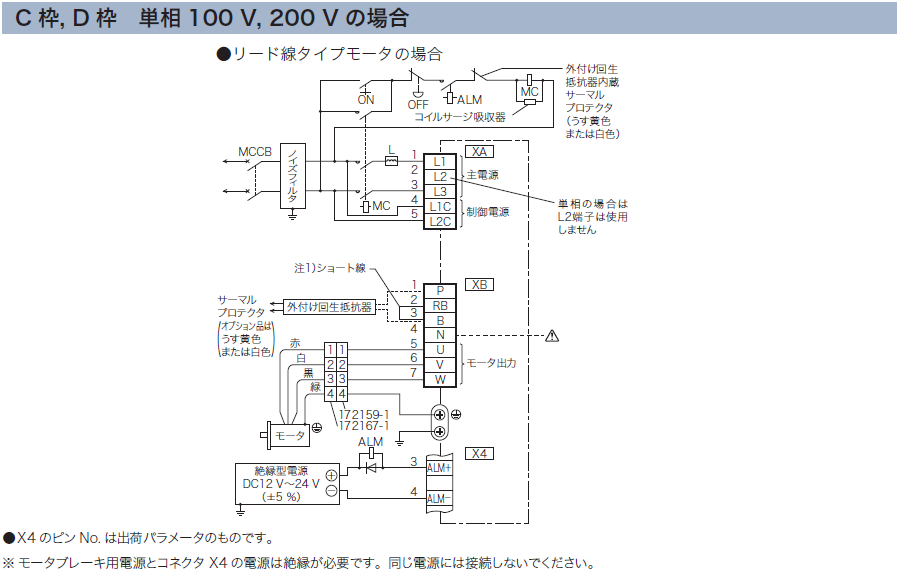
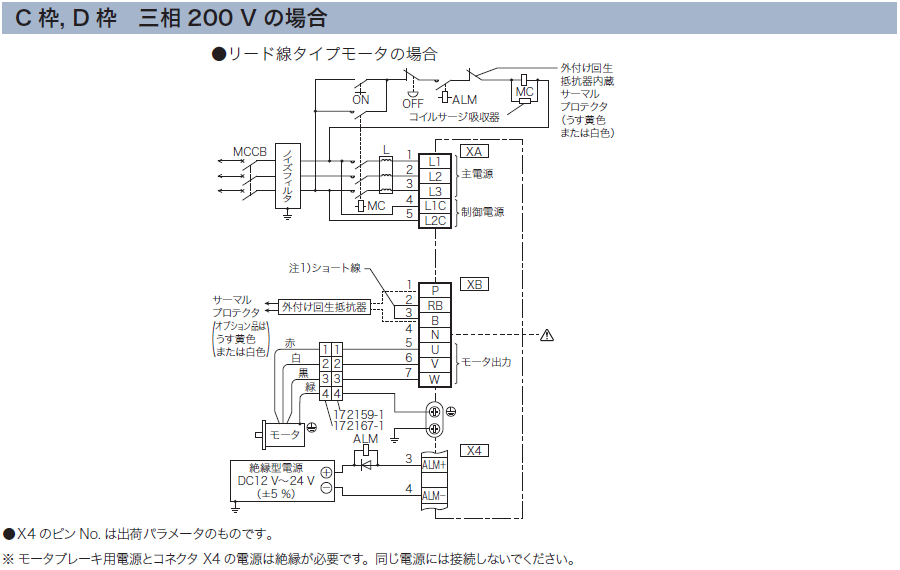
主回路接続例
コネクタXA, XB, 端子台の接続
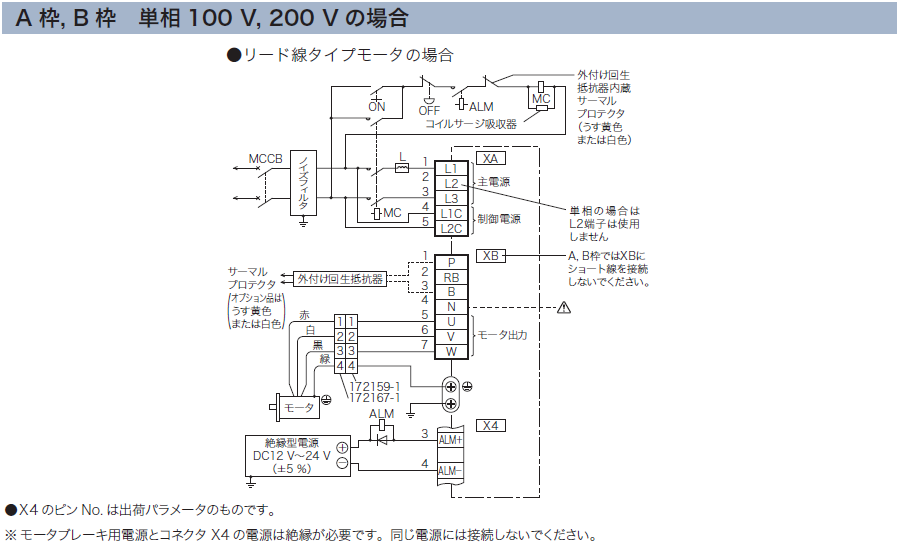
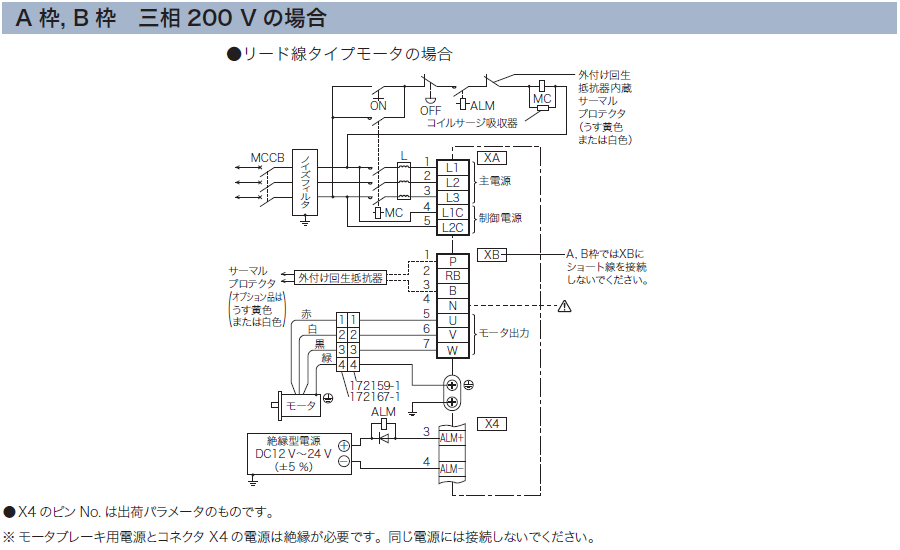
回生抵抗器の接続
| 枠番 | ショート線 | 回生抵抗器内蔵 | コネクタXB の接続 | |
|---|---|---|---|---|
| 外付け回生抵抗器を使用する場合 | 外付け回生抵抗器を使用しない場合 | |||
| A枠 B枠 | 無し | 無し | P−B 間 外付け回生抵抗器を接続 | P−B 間 常時開放 |
注1)
| 枠番 | ショート線(付属品) | 回生抵抗器内蔵 | コネクタXB の接続 | |
|---|---|---|---|---|
| 外付け回生抵抗器を使用する場合 | 外付け回生抵抗器を使用しない場合 | |||
| C枠 D枠 | 有り | 有り | RB−B 間 付属のショート線を外す P−B 間 外付け回生抵抗器を接続 | RB−B 間 付属のショート線で短絡 |
セーフティ機能
コネクタX3の接続
上位コントローラを接続して、セーフティ機能をコントロールするセーフティ回路を構築することができます。
セーフティ回路を構築しない場合は、付属のセーフティバイパスプラグをご使用ください。
セーフトルクオフ(STO)機能概要
セーフトルクオフ(以下、STO)機能とは、セーフティ入力信号から、回路(ハード)でサーボアンプ内部のパワートランジスタの駆動信号を強制的にオフすることでモータ電流を遮断し、モータの出力トルクをオフにするセーフティ機能です。
STO機能が働くとサーボアンプはサーボレディ出力信号(S-RDY)をオフにしてSTO状態となり、前面パネルの表示が「St」となります。また、STO入力が解除、かつ、サーボオン入力がオフ(OFF)になったとき自動的にサーボオフ状態に遷移します。
安全上のご注意
- STO機能を使用する際は、必ず装置でのリスクアセスメントを実施し、システムとしての安全要求事項を満足することを確認してください。
安全要求機能を満たさない状態での使用は、場合により人身事故に至ることがあります。 - STO機能が働いている場合でも以下の危険性があるため、必ずリスクアセスメントの中で安全性を考慮してください。誤った使用は、場合により人身事故に至ることがあります。
- 外力がある場合(例えば垂直軸での重力など)はモータが動きますので、保持が必要な場合は別途外部ブレーキなどの手段を講じてください。なお、ブレーキ有りサーボモータのブレーキは保持専用で、制動用途には使用できませんので注意してください。
- また、外力がない場合でも、パラメータPr5.10「アラーム時シーケンス」でフリーラン(ダイナミックブレーキ無効)に設定されている場合、モータはフリーランとなり停止距離が長くなります。これが問題とならないようにしてください。
- パワートランジスタの故障などにより、電気角で最大180度の範囲でモータが動く可能性があります。これが問題とならないようにしてください。
- STO機能ではモータへの通電は遮断されますが、サーボアンプへの通電は遮断されず、電気的な絶縁もおこなわれません。サーボアンプの保守などの際は、別途サーボアンプへの通電を遮断するなどの手段を講じてください。
- EDM出力信号は安全出力ではありません。故障監視機能以外の用途には使用しないでください。誤った使用は、場合により人身事故に至ることがあります。
- STO状態モニタ出力信号は安全関連部ではありません。システムの設計では、STO状態モニタ出力信号が正常に出力できない状態であっても危険な状態にならないことを確認してください。誤った使用は、場合により人身事故に至ることがあります。
- ダイナミックブレーキおよび外部ブレーキ解除信号出力は安全関連部ではありません。システムの設計ではSTO状態時に外部ブレーキ解除が故障しても危険な状態にならないことを確認してください。誤った使用は、場合により人身事故に至ることがあります。
- STO機能を使用する際は、安全規格に適合した機器を接続してください。安全規格に適合していない機器の使用は、場合により人身事故に至ることがあります。
[ピン配置図]
(ケーブル側から見た図)

*NCには何も接続しないでください。
●システム構成例

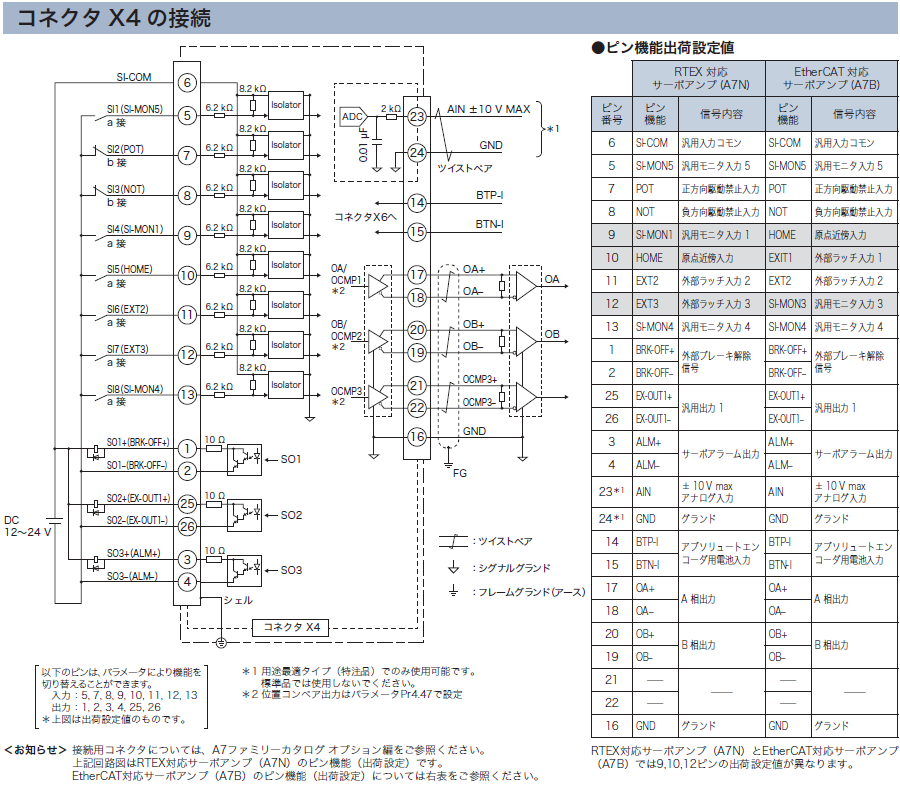
制御回路接続図
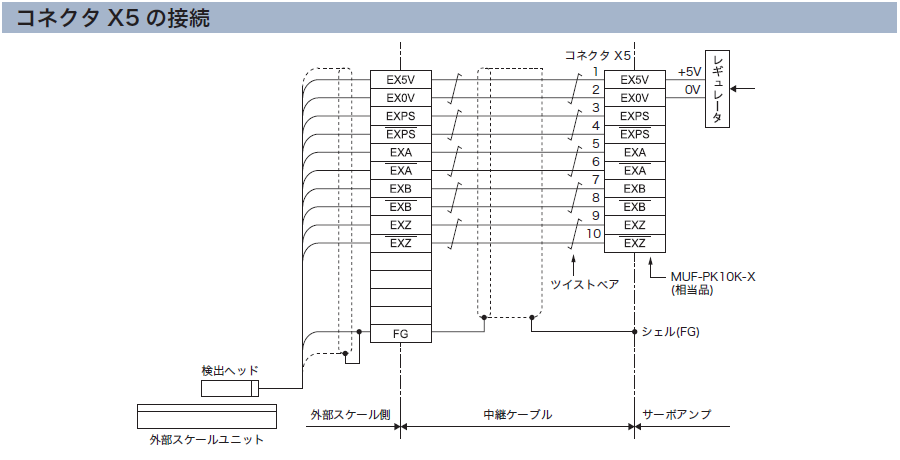
コネクタX4, X5の接続
コネクタX6の接続