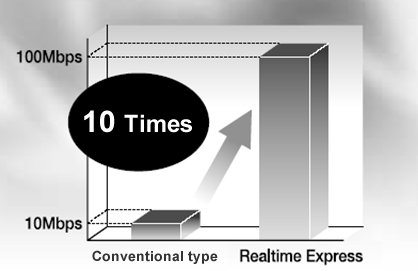
Advanced Network to realize high-precise
real-time performance for Servo Control
Concept
✓ High Performance & Low Cost
✓ Simple
✓ High Reliability
✓ Easy Development
Panasonic Industry > Automation Controls Top > Motors for FA & Industrial Application > Motors > AC Servo > Realtime Express(RTEX)
✓ High Performance & Low Cost
✓ Simple
✓ High Reliability
✓ Easy Development
Please feel free to contact us if you have any inquiries or
would like to have a conference or request quotations for RTEX

*Realtime Express and RTEX are registered trademarks of Panasonic Holdings Corporation.
Introducing Realtime Express(RTEX)
Related Files



Related Information
![]()
![]()

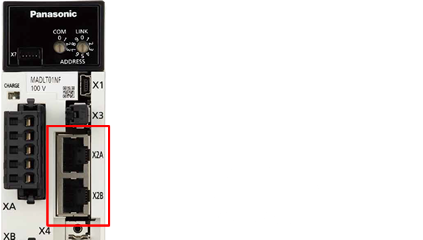
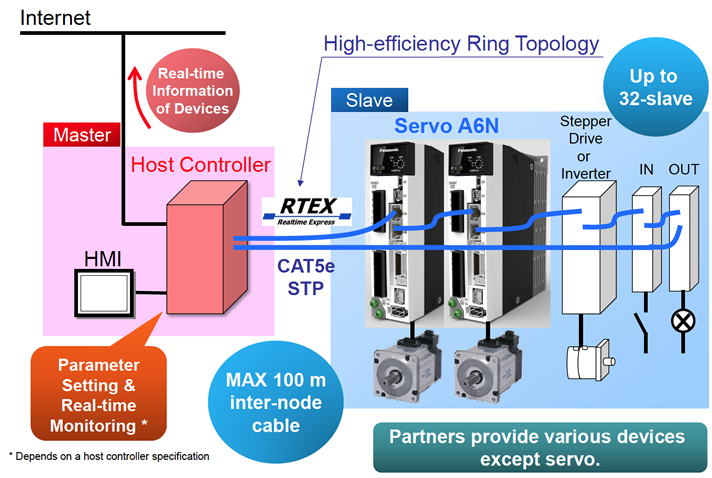
Realtime Express is a high speed synchronous motion network developed by Panasonic Industry Co., Ltd. |
 |
| (*1) | Depends on a host controller specification |
|---|---|
| (*2) | CAT5e STP |
| * | Realtime Express and RTEX are registered trademark of Panasonic Holdings Corporation. |

| * | 2022.01 |
|---|
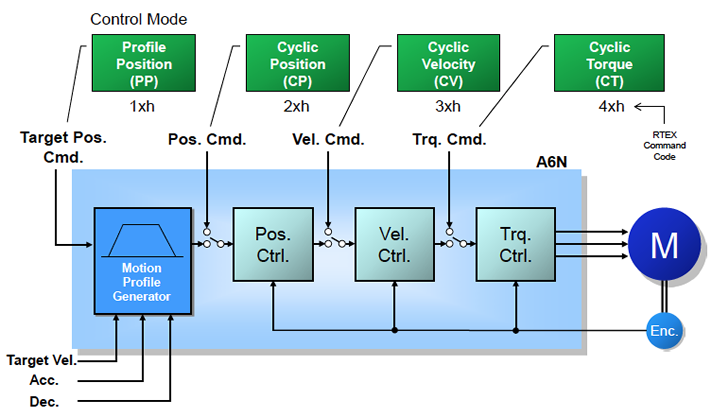
| Note: | Profile Position is applicable to only “Point to Point (PTP)” control. |
|---|
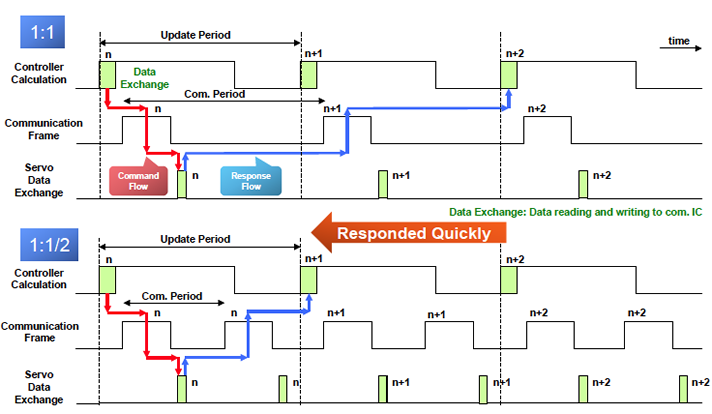
| Update Period |
Com. Period | Max. # of Axes (*) | Available Mode | ||
|---|---|---|---|---|---|
| 16-byte Mode | 32-byte Mode | ||||
| 4.000 ms | 2.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 2.000 ms | 2.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 2.000 ms | 1.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 1.000 ms | 1.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 1.000 ms | 0.500 ms | 32 | 16 | PP, CP, CV, CT | Typical |
| 0.500 ms | 0.500 ms | 32 | 16 | PP, CP, CV, CT | |
| 0.500 ms | 0.250 ms | 16 | - | PP, CP, CV, CT | |
| 0.250 ms | 0.250 ms | 16 | - | PP, CP, CV, CT | |
| 0.250 ms | 0.125 ms | 8 | - | CP, CV, CT | |
| 0.125 ms | 0.125 ms | 8 | - | CP, CV, CT | |
| 0.125 ms | 0.0625 ms | 4 | - | CP, CV, CT | |
| Com. Period | : | Frame transmitting period |
|---|---|---|
| Update Period | : | Data inside the frame updating period |
| * | If some devices except servo is also connected on RTEX, this number is decreased. |
|---|
| Note: | The same command is transmitted two times. If previous command has communication error, the subsequent one is used in servo. |
|---|
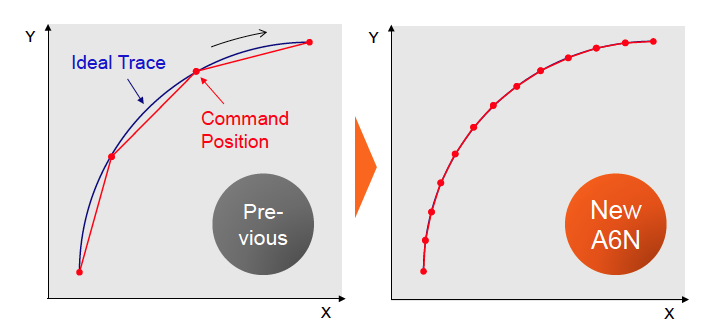
Increased the number of points per distance makes command position more smooth in addition to new high-resolution encoder.
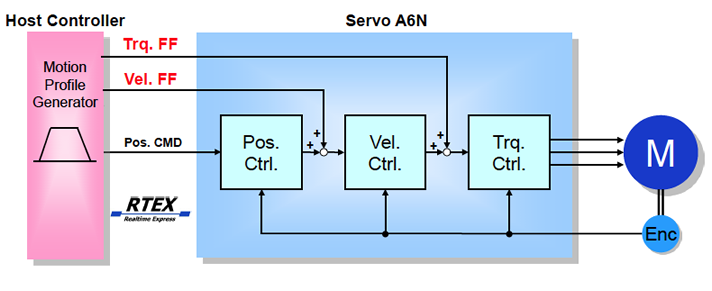
| * | In 16-byte mode, either velocity or torque FF available. |
|---|---|
| * | Torque FF is also useful for torque compensation in “Stick Motion” of circular interpolation. |